Продолжительность
5 месяцев (20
уроков/90
минут)
Возраст
10+
лет
Уровень
Запишитесь на первое бесплатное онлайн занятие
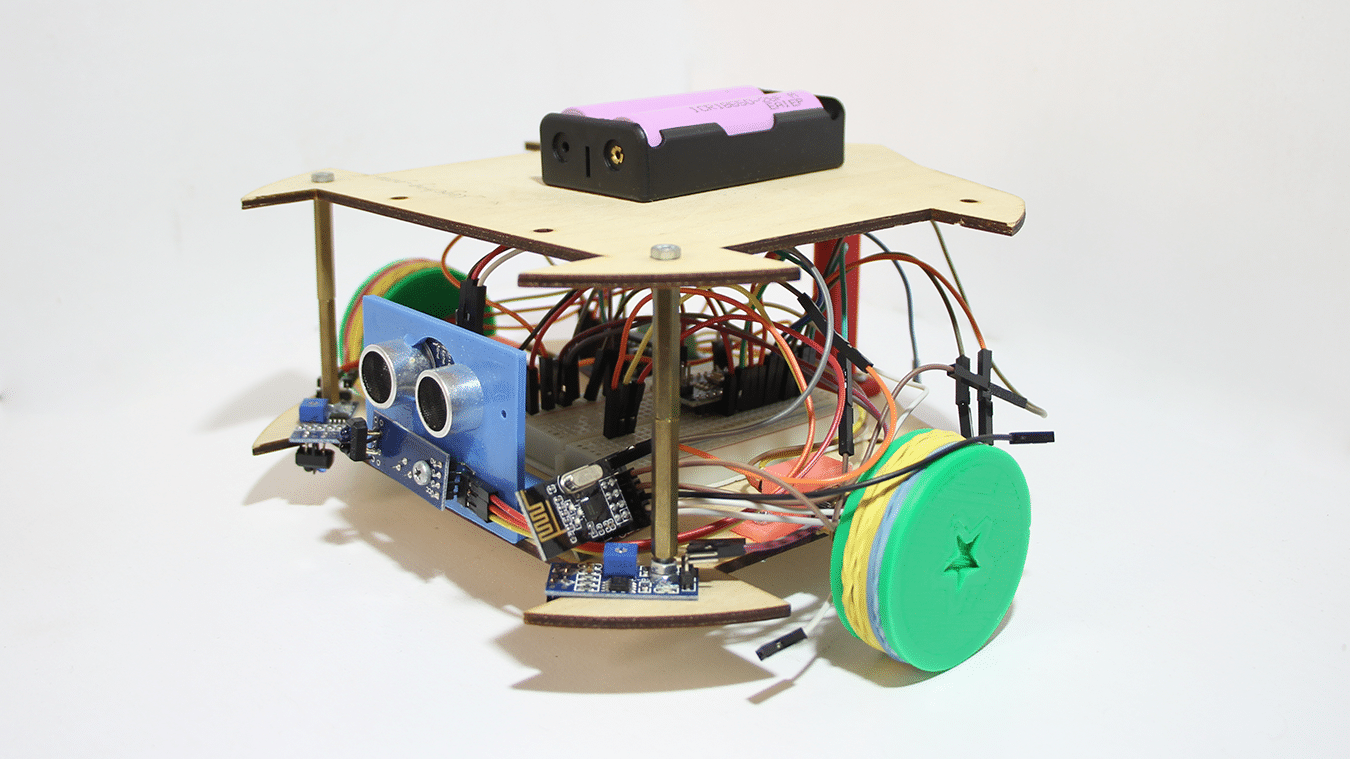
Программа посвящена разработке собственного робота для участия в районных/городских соревнованиях по робототехнике в дисциплине «Кегельринг». Суть соревнования в том, что робот должен за минимальное время найти и вытолкнуть за пределы поля кегли.
Программа начинается с создания робота. Ученики пользуются набором электронных компонентов, контроллером Arduino IDE, датчиками линии и датчиком дальности. Параллельно со сборкой «начинки» робота, ученики начинают создавать алгоритмы движения. Корпус робота также создается ребятами самостоятельно в специальной программе для 3D моделирования – FreeCAD, затем печатается на 3D принтере и вырезается на лазерном гравере.
Заключительная часть программы посвящена подготовке к соревнованиям. В конце курса мы устраиваем внутренние соревнования. Ученики совершенствуют свой алгоритм движения и дополняют его, чтобы показать лучший результат.
Знания
Электронные компоненты: датчик дальности, регулятор, монитор порта; программирование Arduino IDE: алгоритмы с использованием датчика дальности и датчика линий, aрифметические и логические операции для обработки данных с датчиков; моделирование в FreeCAD
Требования
Минимальные навыки работы за компьютером
Отзывы
В марте 2019 года наши ученики принимали участие в соревнованиях по робототехнике Кировского района г. Санкт-Петербурга в дисциплине «Кегельринг». Посмотрите видеорепортаж с этого события. Наши ученики Даниил и Роман показали отличный результат и поделились впечатлениями от своих первых соревнований.
В нашей группе Вконтакте также есть ролик о том, как ребята готовились к соревнованиям: смотреть здесь.
| Урок 1 | Последовательный порт |
| Урок 2 | Serial-соединение, функция Serial.read() |
| Урок 3 | Цикл while, команды для робота |
| Урок 4 | Управление движениями робота через последовательный порт |