Программа занятий по робототехнике Робикс: 3-й уровень. “Кегельринг”.
Программа 3-го уровня посвящена разработке собственного робота для участия в районных / городских соревнованиях по робототехнике в дисциплине “Кегельринг”.
Задача соревнований: найти все кегли внутри поля и вытолкнуть их за пределы как можно быстрее. Соревнования проходят как с одноцветными так и с цветными кеглями. В последнем случае нужно вытолкнуть за пределы ринга только кегли определенного цвета.
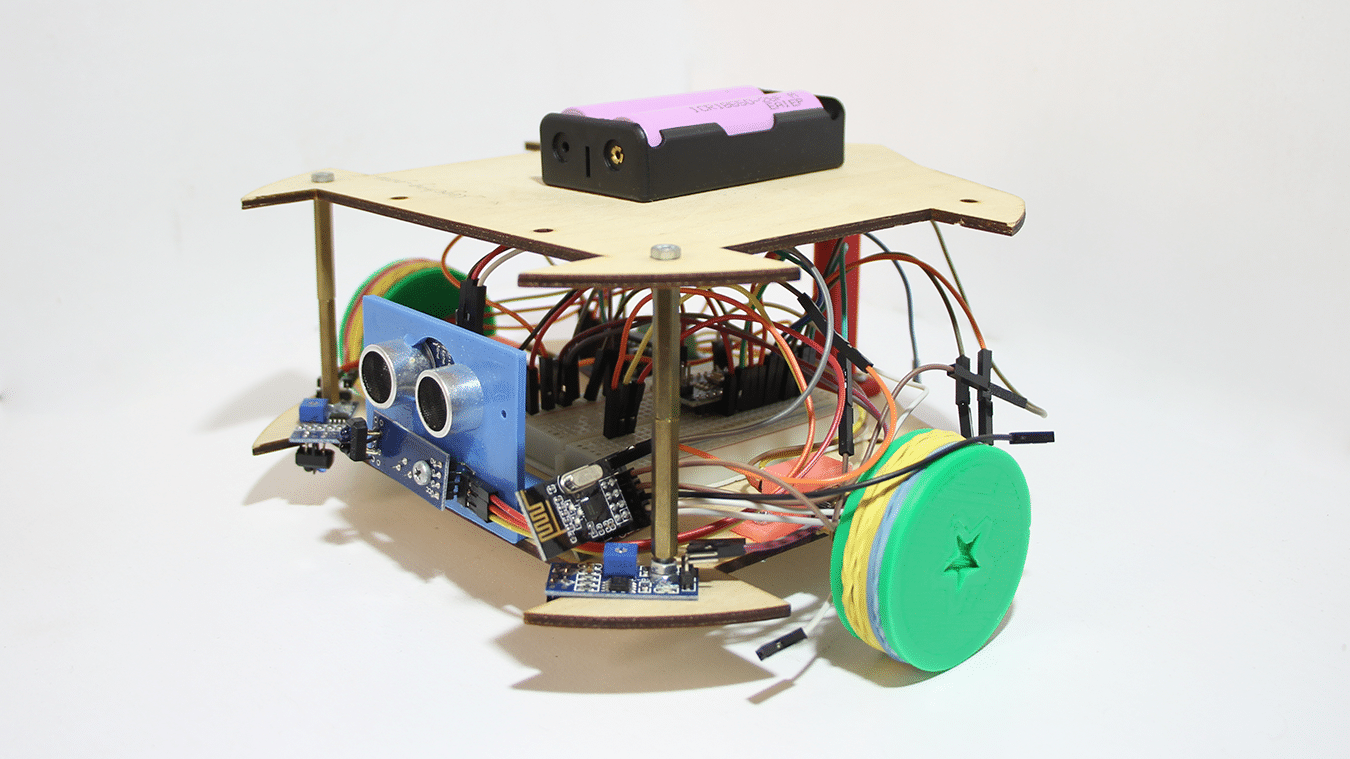
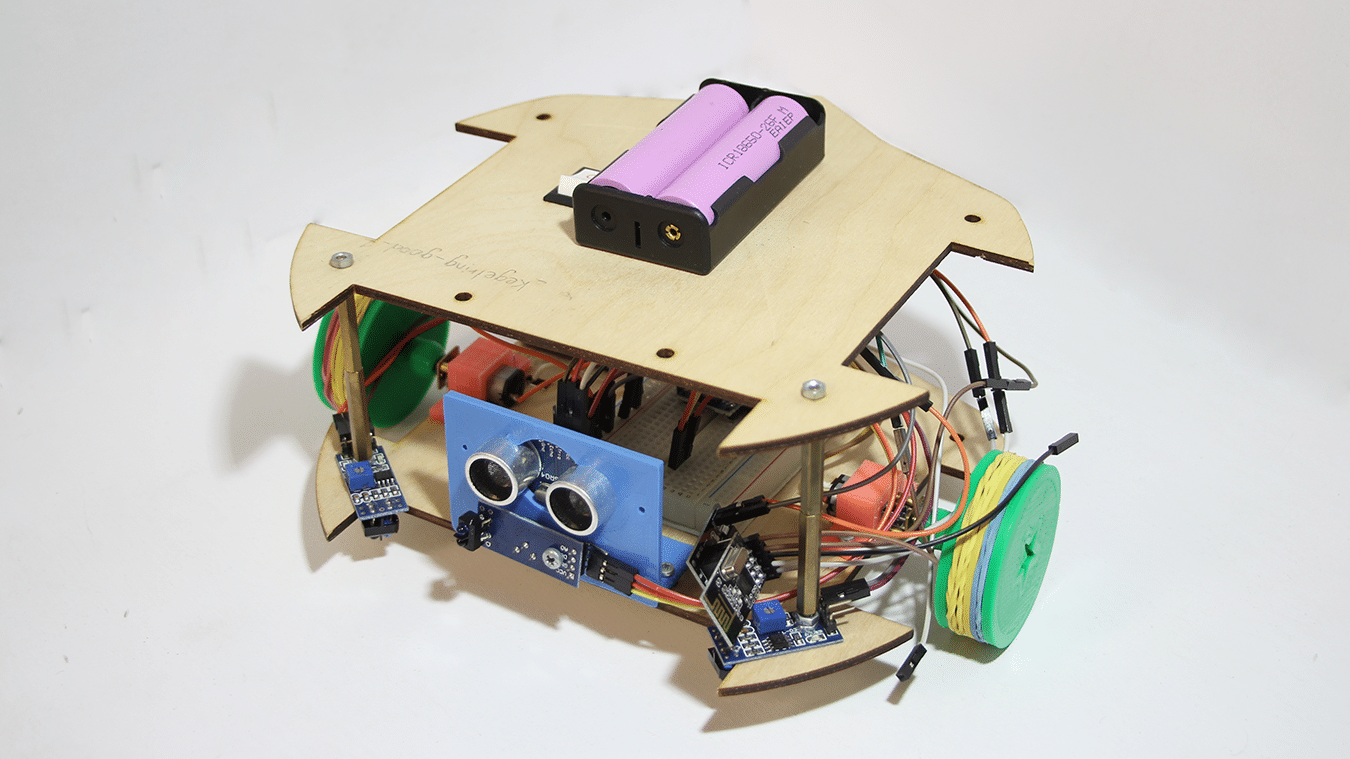
Для создания робота ученики работают с набором электронных компонентов, контроллером Arduino IDE, датчиками линии и датчиком дальности. Они моделируют корпус робота в ПО Freecad, затем он печатается на 3D принтере, вырезается на лазерном гравере.
Программа занятий по робототехнике “Робот – кегельринг”.
Часть 1. Программирование и отладка робота с помощью монитора порта
3Ч Урок №1.Последовательный порт
3Ч Урок №2 .Serial-соединение, функция Serial.read()
3Ч Урок №3. Цикл while, команды для робота
3Ч Урок №4. Управление движениями робота через последовательный порт
Часть 2. Работа с ультразвуковым датчиком расстояния, пропорциональный регулятор.
3Ч Урок №5 .Ультразвуковой датчик расстояния
3Ч Урок №6. Разработка крепления для датчика HC-SR04
3Ч Урок №7. Разработка алгоритма движения вдоль стены
3Ч Урок №8. Управление скоростью моторов
3Ч Урок №9. Движение вдоль стены, пропорциональный регулятор
Часть 3. Разработка корпуса робота для соревновательной дисциплины “Кегельринг”.
3Ч Урок №10. Кегельринг. Постановка задачи.
3Ч Урок №11. Разработка корпуса нового робота
3Ч Урок №12. Проектирование основы робота
3Ч Урок №13. Сборка основных узлов робота
3Ч Урок №14. Модель верхней крышки и переднего крепления блока датчиков
3Ч Урок №15. Окончательная сборка робота
Часть 4. Написание алгоритма и подготовка к районным / городским соревнованиям.
3Ч Урок №16.1 Разработка алгоритма и программы для участия в соревнованиях
3Ч Урок №16.2 Разработка алгоритма и программы для участия в соревнованиях. Движение робота по заранее заданной траектории.
3Ч Урок №16.3.Разработка алгоритма и программы для участия в соревнованиях. Использование алгоритмов с датчиками линии.
3Ч Урок №16.4 Разработка алгоритма и программы для участия в соревнованиях. Робот движется по сигналам от датчиков линии и расстояния
3Ч Урок №16.5 Рекомендации по подготовке робота к соревнованиям
Репортаж с районных соревнований “Кегельринг”
В Марте 2019 года наши ученики принимали участие в соревнованиях по робототехнике Кировского района г. Санкт-Петербурга с дисциплине “Кегельринг”. Прикладываем видеорепортаж с этого события.