Робот – паук Quadruped на Arduino c ИК пультом
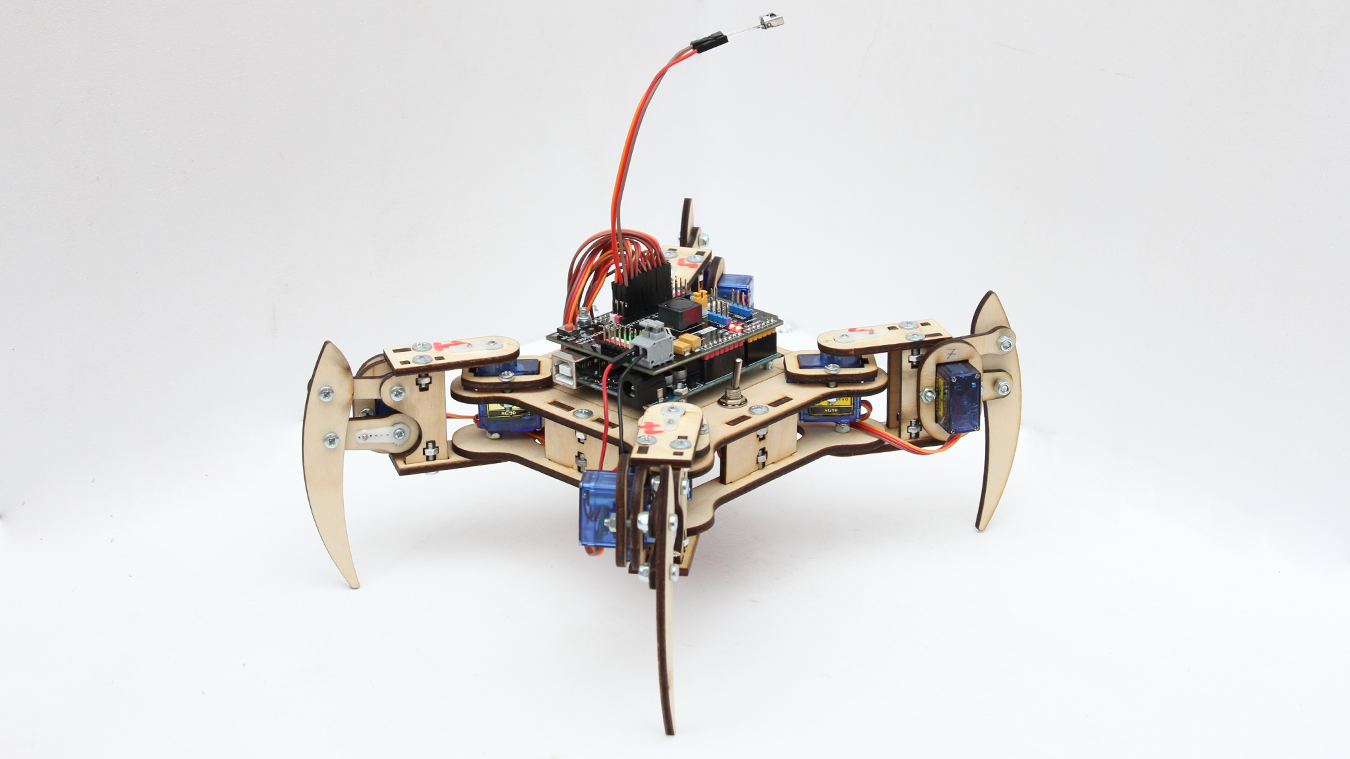
Инструкция по сборке и программированию робота – паука Quadruped на Arduino. Этот робот умеет перемещаться на 4 “ногах”: двигаться вперед, назад, влево , вправо, по диагонали. Управлять им будем с помощью ИК пульта и ИК датчика. К роботу можно присоединить датчик дальности или датчики линии для решения робототехнических задач, участия в соревнованиях.
Список комплектующих (Bill of materials)
| № | Название | Кол-во |
| 1 | Плата Arduino UNO | 1 |
| 2 | Плата расширения для подключения сервоприводов и питания iArduino Multi servo shield | 1 |
| 3 | Серво – моторы с металлическим редуктором SG90s | 8 |
| 4 | Батарейный отсек 18650×2 | 1 |
| 5 | Литиевые аккумуляторы 18650 | 2 |
| 6 | ИК пульт | 1 |
| 7 | ИК датчик | 1 |
| 8 | Джамперы Dupont разъем – разъем (female – female) 10 см | 3 |
| 9 | Провода | 1 м |
| 10 | Тумблер | 1 |
| 11 | Набор деревянных деталей для сборки | |
| 12 | Винты М3 x 10 потайные | 40 |
| 13 | Винты М3 x 12 | 16 |
| 14 | Винты М3 x 16 потайные | 4 |
| 15 | Винты м3х10 потайные | 2 |
| 16 | Гайки м3 самоконтрящиеся / Nylock | 17 |
| 17 | Гайки м3 | 45 |
Файлы для резки
Корпус робота вырезаем на лазерном гравере из фанеры 3мм. Чертежи в формате dxf скачиваем по ссылке.
Инструменты для сборки
- Отвертка крестовая или шлиц под винты М3
- Плоскогубцы (для закручивания самоконтрящихся гаек с усилием)
- Паяльник и расходники для пайки:
- флюс
- припой
- бокорезы или канцелярский нож для снятия изоляции
- Клеевой пистолет и клей для него
- Немного терпения и внимательности 🙂
Сборка робота
1. Выставляем сервоприводы на 90′
Перед сборкой выставляем все сервоприводы на угол 90′ . Сделать это можно c помощью простой программы:
#include <Servo.h>
Servo s; // cоздаем объект сервопривод под именем s, для управления 4 серво нужно создать 4 объекта
void setup() {
s.attach(8); // управляем серво на пине D8, таким образом нужно подключить все серво
}
void loop() {
s.write(90);// поворачиваем выбранный серво на угол 90 градусов
}2. Сборка конечностей
Далее собираем 4 конечности паука – ноги. Здесь подробно описываем инструкцию для одной ноги, остальные собираем аналогично.
| № | Название детали |
| 1 | Поворотная пластина верхней части ноги |
| 2 | Поворотная пластина нижней части ноги |
| 3 | Крепление сервопривода для ноги |
| 4 | Винтик сервопривода |
| 5 | Одинарная качалка сервопривода |
| 6 | Сервопривод |
| 7 | Ножка сервопривода |
| 8 | Ножная параллельная связующая |
| 9 | Ножная параллельная пластина |
| 10 | M3 x 10mm Винт (с шапочкой) |
| 11 | Гайка М3 |
| 12 | Гайка М3 самоконтрящаяся (нулок) |
| 13 | M3 x 12mm Винт |
| 14 | Фиксатор сервопривода |
| 15 | Шуруп сервопривода |
| 16 | Нога |
- Вставьте одинарный сервопривод в поворотную пластину верхней части ноги и вкрутите винт крепления сервопривода в одинарный рычаг сервопривода с задней стороны верхней поворотной пластины стойки(как на картинке выше).
- Вставьте одиночный рычаг сервопривода в рычаг сервопривода ноги и вкрутите винт крепления сервопривода в одиночный рычаг сервопривода с задней стороны рычага сервопривода ноги.
- Прикрепите одну параллельную тягу к ноге с помощью винта M3 x 10 мм и гайки M3 Nyloc.
- Прикрепите ногу к сервомеханизму ноги с помощью винта M3 x 10 мм и гайки M3 Nyloc. ВАЖНО! Не перетягивайте винты в шагах 2 и 3. Суставы ног должны двигаться свободно, НО НЕ БОЛТАТЬСЯ, чтобы предотвратить чрезмерное трение, которое может привести к отказу сервоприводов.
шк