Программа занятий по робототехнике Робикс: 2-й уровень. “Робот линии”
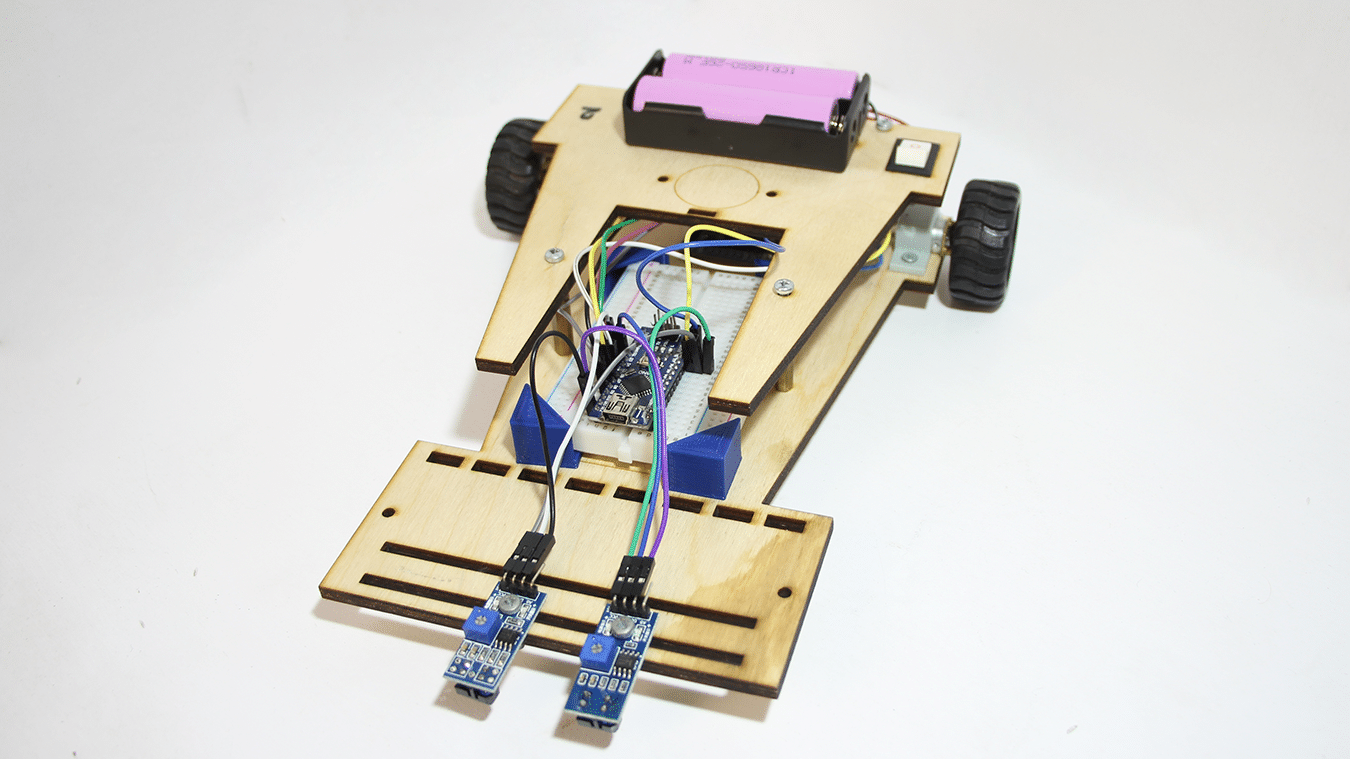
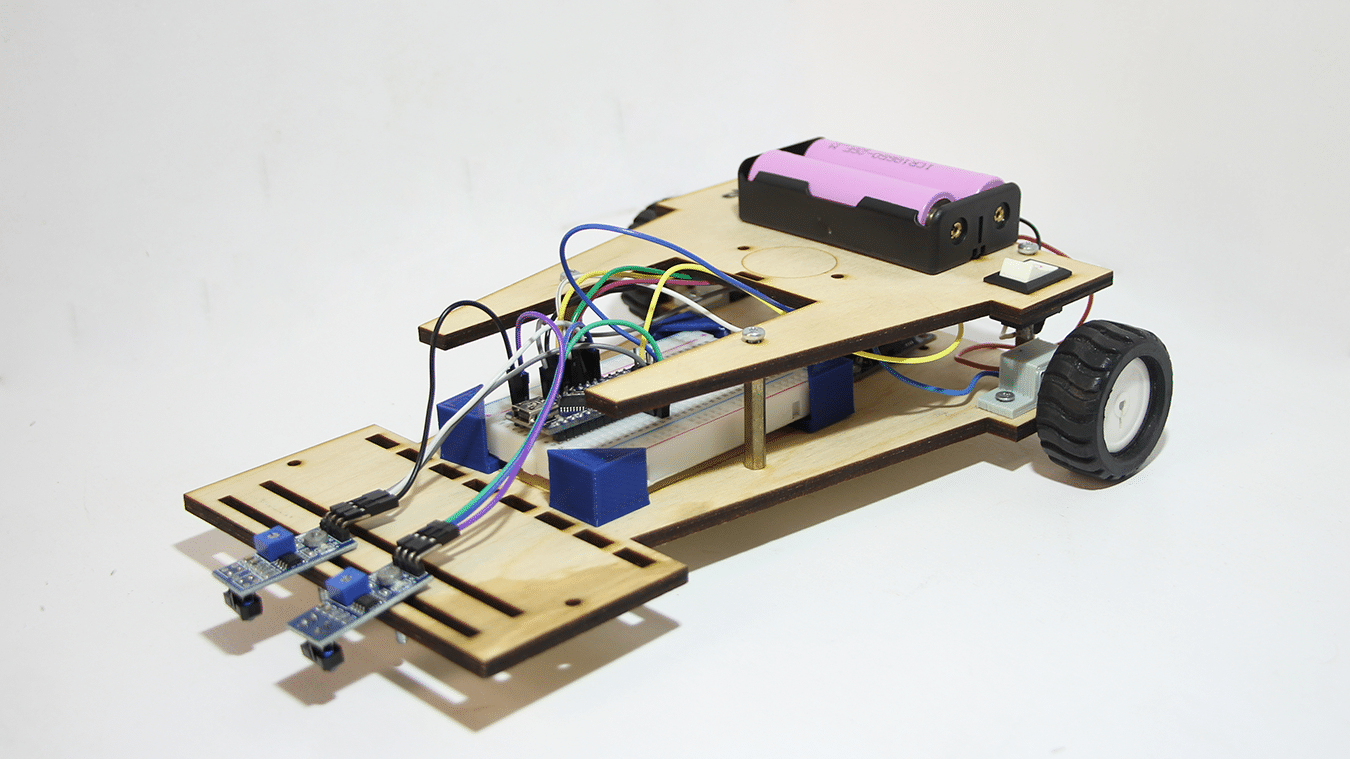
На программе второго уровня ученики Робикс собирают робота для участия в соревнованиях “движение по линии”. Они работают с набором электронных компонентов , контроллером Arduino, проектируют детали для робота в ПО FreeCAD , которые затем печатаются на 3D принтере, вырезаются на лазерном гравере.
Когда робот готов, они участвуют в районных или городских соревнованиях по робототехнике.
План программы по робототехнике: Робот-линии
Часть 1. Основы Arduino IDE (С++), знакомство с макетной платой
2Ч. Урок №1. Изучение основ Arduino IDE.
2Ч. Урок №2. Макетная плата.
2Ч. Урок №3. Включение ПИНа через DigitalWrite, светодиоды.
2Ч. Урок №4. Учим робота общаться с помощью сигналов. Закрепление материала по digitalWrite.
2Ч. Урок №5. Проектирование корпуса фары (под светодиод)
2Ч. Урок №5.1. Установка фары на корпус и программирование
2Ч. Урок №6. Переменные сигналы. Пьезопластина.
2Ч. Урок №6.1 Переменныие сигналы
2Ч. Урок №6.2 Пайка проводов к пьезопластине
2Ч. Урок №6.3 Моделирование корпуса для пьезопластины.
2Ч. Урок №6.4. Понятие ШИМ. AnalogWrite
2Ч. Урок №7.1. Моторы
Часть 2. 3D моделирование в CAD. Производство деталей корпуса робота на 3D принтере, лазере.
2Ч. Урок №7.2. Моделирование крепежа для моторов.
2Ч. Урок №7.3. Моделирование колеса для моторов.
2Ч. Урок №7.4. Сборка и подключение.
2Ч. Урок №7.5. Функции
2Ч. Урок № 8.1. Знакомство с digitalRead
2Ч. Урок №8.2 Езда по линии с помощью датчиков линии
2.Ч. Урок № 8.3. Продолжение езды по линии
Часть 3. Доработка робота, внутренние соревнования
2.Ч. Урок № 9.1 Батарейный отсек
2.Ч. Урок № 9.2 Держатель макетной плат
2.Ч. Урок № 9.3 Доработка токоведущих элементов
2.Ч. Урок № 10 Игра-соревнование
Часть 4. Совершествование алгоритма. Основы теории управления.
2.Ч. Урок № 11.1 Последовательный порт. Вывод данных
2.Ч. Урок № 11.2 Последовательный порт. Отладка
2.Ч. Урок № 12. Аналоговый датчик линии, движение с его помощью по линии.
2.Ч. Урок № 13. Калибровка датчиков. (Подключение кнопки, написание кода)
2.Ч. Урок № 14. Движение P-регулятора на двух аналоговых датчиках линии.
2.Ч. Урок № 15. Движение по линии на аналоговых датчиках. Поворот на 90 градусов.
2.Ч. Урок №16. Движение по линии на аналоговых датчиках. Перекресток.
2.Ч. Урок № 17. Финальная игра
Соревнования в дисциплине “Движение по линии”.
В Ноябре 2019 года мы организовали соревнования по робототехнике в дисциплинах “Движение по линии” и “Кегельринг”. Короткий репортаж с этих соревнований смотрите ниже.